Introduction
Simulation - Spring Oscillations with Damping (click to hide)
The slider for damping adjusts the value of \(\frac{\gamma}{2 \omega}\) and defaults to 0 (no damping).
When the slider value is set to 1, the system is critically damped. A value greater than or less than 1 represents the cases of over-damping and under-damping respectively. Observe the difference among the three different cases of damping.
The calculations below is updated the moment the simulation is paused.
Oscillations in physics is described by the equation:
This equation is also known as the SHO equation, where "SHO" stands for "simple harmonic oscillation". It is the oscillation caused by a simple restoring force (such as that of a spring obeying Hooke's Law) in the absence of friction and other external forces. It is a very important equation in physics. Even when a system is not strictly simple harmonic, often it could still be described by this equation to a good approximation.
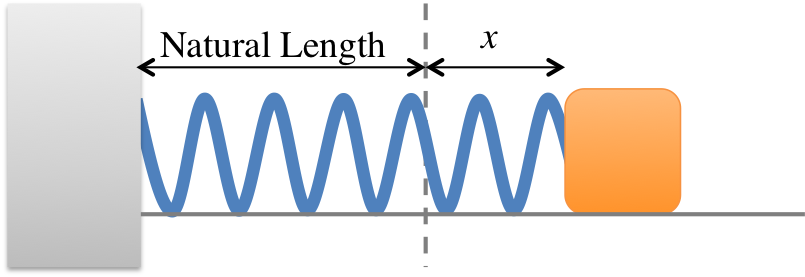
Simulation - Hooke's Law (click to hide)
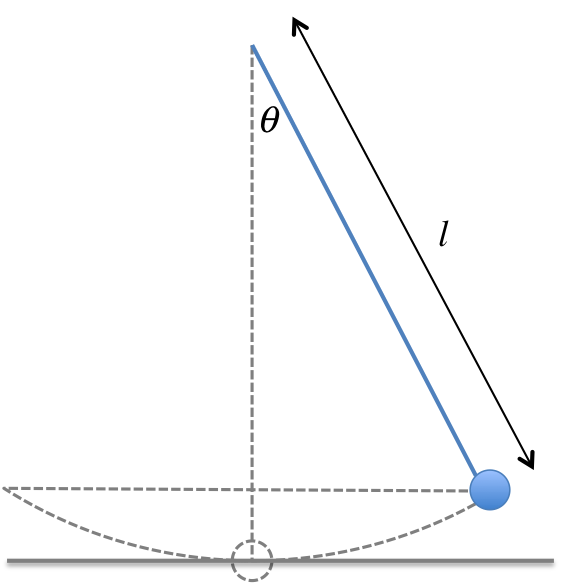
Simulation - Simple Pendulum (click to hide)
Drag on the ball to change the length.
Drag on the bar to change the angle.
Click on the clock to reset the timer.
The mass of the object is fixed to be \(m = 1kg\).
The grey horizontal line represents the lowest level of the pendulum trajectory, used as a reference level for height measurement.
Activity
Use the clock to time 10 oscillations and deduce the period. Repeat for a different length and see how the period changes.